白線の認識から少し時間がたってしまいましたが、最小2乗法でコースとマシンとの傾きとズレを計算することが出来ました。
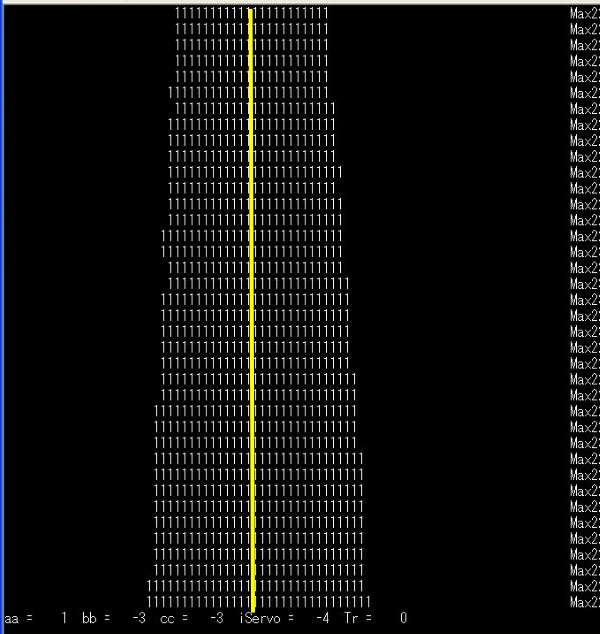
黄色い線が計算で求めた直線です。aa=1、bb=-3が実際の数値となります。次にマシンを右に寄せてみました。
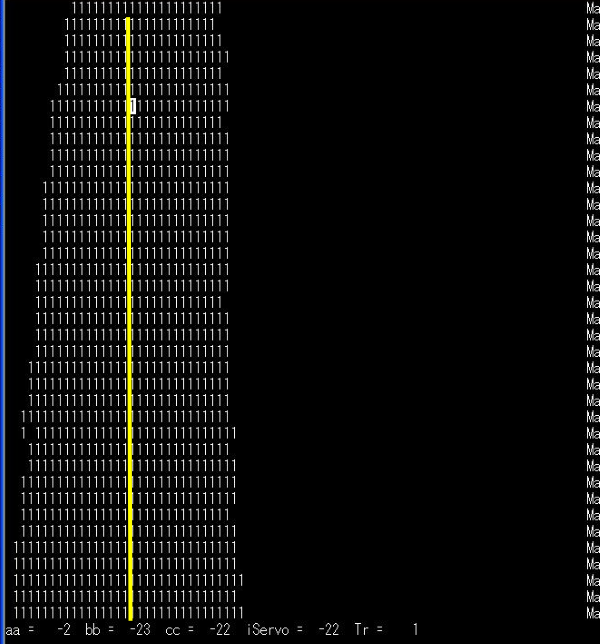
このようになります。この例は極端ですが、マシンがコースに平行となっていて位置がずれていることが判ります。この時、スピードは落とさずにゆっくりとコースの中心に合わせるようにプログラムを組んでいきます。ではカーブでは
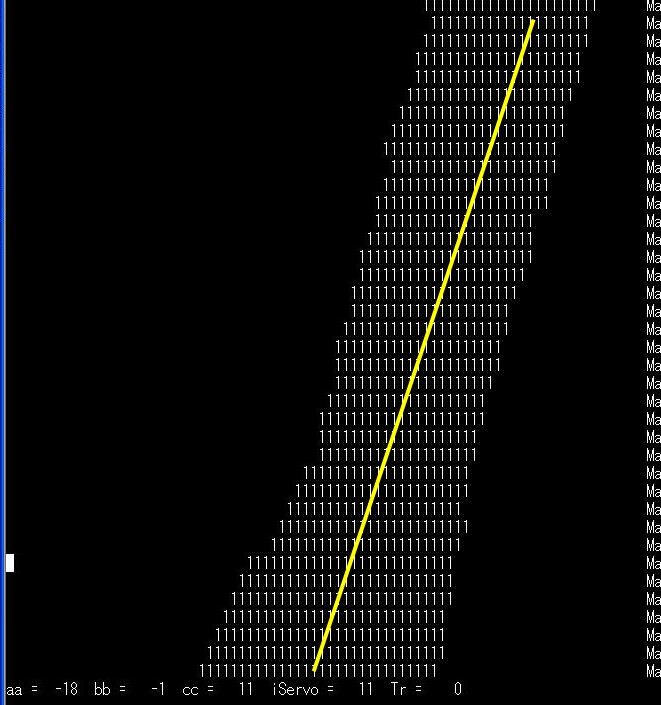
このような形となります。位置のズレはないのですが、傾きが大きく出ていますので、この数値からサーボの角度とスピードをコントロールしたいと思います。
残り日数が少なくなってきました。停止マークをどうすればよいか思案中です。停止マークは白線の右にあるのか、左にあるのは、はたまた、白線の上にあるのかで状況は変わってきます。いや、白線がなくなっていて停止マークだけあるのかもしれません。